Finding a New Representation of the Given Equation after Rotating through a Given Angle
Until now, we have looked at equations of conic sections without an [latex]xy[/latex] term, which aligns the graphs with the x– and y-axes. When we add an [latex]xy[/latex] term, we are rotating the conic about the origin. If the x– and y-axes are rotated through an angle, say [latex]\theta[/latex], then every point on the plane may be thought of as having two representations: [latex]\left(x,y\right)[/latex] on the Cartesian plane with the original x-axis and y-axis, and [latex]\begin{align}\left({x}^{\prime },{y}^{\prime }\right)\end{align}[/latex] on the new plane defined by the new, rotated axes, called the x’-axis and y’-axis.
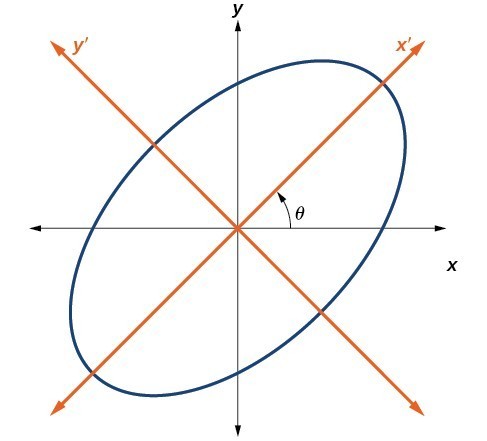
The graph of the rotated ellipse [latex]{x}^{2}+{y}^{2}-xy - 15=0[/latex]
We will find the relationships between [latex]x[/latex] and [latex]y[/latex] on the Cartesian plane with [latex]\begin{align}{x}^{\prime }\end{align}[/latex] and [latex]\begin{align}{y}^{\prime }\end{align}[/latex] on the new rotated plane.
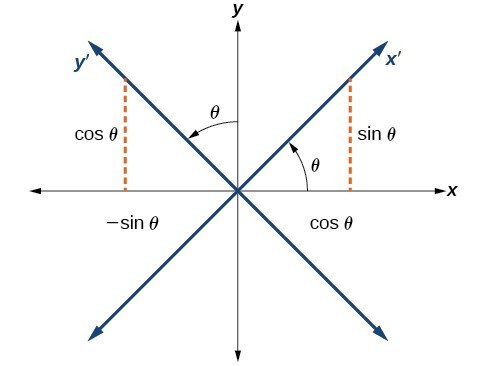
The Cartesian plane with x- and y-axes and the resulting x′− and y′−axes formed by a rotation by an angle [latex]\theta [/latex].
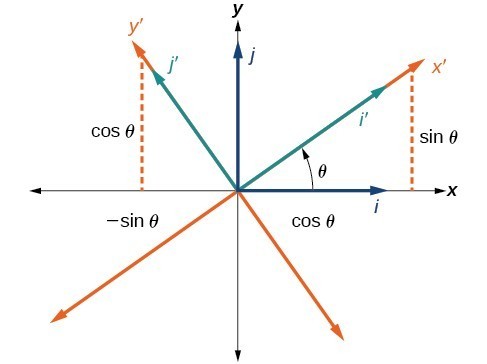
The original coordinate x– and y-axes have unit vectors [latex]i[/latex] and [latex]j[/latex]. The rotated coordinate axes have unit vectors [latex]\begin{align}{i}^{\prime }\end{align}[/latex] and [latex]\begin{align}{j}^{\prime }\end{align}[/latex]. The angle [latex]\theta[/latex] is known as the angle of rotation. We may write the new unit vectors in terms of the original ones.
Because [latex]\begin{align}u={x}^{\prime }{i}^{\prime }+{y}^{\prime }{j}^{\prime }\end{align}[/latex], we have representations of [latex]x[/latex] and [latex]y[/latex] in terms of the new coordinate system.
If a point [latex]\left(x,y\right)[/latex] on the Cartesian plane is represented on a new coordinate plane where the axes of rotation are formed by rotating an angle [latex]\theta[/latex] from the positive x-axis, then the coordinates of the point with respect to the new axes are [latex]\begin{align}\left({x}^{\prime },{y}^{\prime }\right)\end{align}[/latex]. We can use the following equations of rotation to define the relationship between [latex]\begin{align}\left(x,y\right)\end{align}[/latex] and [latex]\begin{align}\left({x}^{\prime },{y}^{\prime }\right):\end{align}[/latex]
How To: Given the equation of a conic, find a new representation after rotating through an angle.
Find [latex]x[/latex] and [latex]y[/latex] where [latex]\begin{align}x={x}^{\prime }\cos \theta -{y}^{\prime }\sin \theta \end{align}[/latex] and [latex]\begin{align}y={x}^{\prime }\sin \theta +{y}^{\prime }\cos \theta \end{align}[/latex].
Substitute the expression for [latex]x[/latex] and [latex]y[/latex] into in the given equation, then simplify.
Write the equations with [latex]\begin{align}{x}^{\prime }\end{align}[/latex] and [latex]\begin{align}{y}^{\prime }\end{align}[/latex] in standard form.
Find a new representation of the equation [latex]2{x}^{2}-xy+2{y}^{2}-30=0[/latex] after rotating through an angle of [latex]\theta =45^\circ[/latex].
Find [latex]x[/latex] and [latex]y[/latex], where [latex]\begin{align}x={x}^{\prime }\cos \theta -{y}^{\prime }\sin \theta \end{align}[/latex] and [latex]\begin{align} y={x}^{\prime }\sin \theta +{y}^{\prime }\cos \theta \end{align}[/latex].
Write the equations with [latex]\begin{align}{x}^{\prime }\end{align}[/latex] and [latex]\begin{align}{y}^{\prime }\end{align}[/latex] in the standard form.