Advanced Applications of the Epsilon-Delta Definition: Proofs, Non-Existence, and Algebraic Calculations
Using the Epsilon-Delta Definition of Limits
We will demonstrate how to use the epsilon-delta definition of a limit to construct a rigorous proof of one of the limit laws. The triangle inequality is a key component of this proof, so let’s review it first.
triangle inequality
The triangle inequality states that if [latex]a[/latex] and [latex]b[/latex] are any real numbers, then [latex]|a+b|\le |a|+|b|[/latex].
Proof
We prove the following limit law: If [latex]\underset{x\to a}{\lim}f(x)=L[/latex] and [latex]\underset{x\to a}{\lim}g(x)=M[/latex], then [latex]\underset{x\to a}{\lim}(f(x)+g(x))=L+M[/latex].
Let [latex]\varepsilon >0[/latex].
Choose [latex]\delta_1>0[/latex] so that if [latex]0<|x-a|<\delta_1[/latex], then [latex]|f(x)-L|<\varepsilon/2[/latex].
Choose [latex]\delta_2>0[/latex] so that if [latex]0<|x-a|<\delta_2[/latex], then [latex]|g(x)-M|<\varepsilon/2[/latex].
Choose [latex]\delta =\text{min}\{\delta_1,\delta_2\}[/latex].
Assume [latex]0<|x-a|<\delta[/latex].
Thus,
Hence,
[latex]\blacksquare[/latex]
Exploring the Non-Existence of Limits
We now explore what it means for a limit not to exist. The limit [latex]\underset{x\to a}{\lim}f(x)[/latex] does not exist if there is no real number [latex]L[/latex] for which [latex]\underset{x\to a}{\lim}f(x)=L[/latex]. For all real numbers [latex]L[/latex], [latex]\underset{x\to a}{\lim}f(x)\ne L[/latex].
To understand what this means, we look at each part of the definition of [latex]\underset{x\to a}{\lim}f(x)=L[/latex] together with its opposite.
| Definition | Opposite |
|---|---|
| 1. For every [latex]\varepsilon >0[/latex], | 1. There exists [latex]\varepsilon >0[/latex] so that |
| 2. there exists a [latex]\delta >0[/latex] so that | 2. for every [latex]\delta >0[/latex], |
| 3. if [latex]0<|x-a|<\delta[/latex], then [latex]|f(x)-L|<\varepsilon[/latex]. | 3. There is an [latex]x[/latex] satisfying [latex]0<|x-a|<\delta[/latex] so that [latex]|f(x)-L|\ge \varepsilon[/latex]. |
Finally, we may state what it means for a limit not to exist. The limit [latex]\underset{x\to a}{\lim}f(x)[/latex] does not exist if for every real number [latex]L[/latex], there exists a real number [latex]\varepsilon >0[/latex] so that for all [latex]\delta >0[/latex], there is an [latex]x[/latex] satisfying [latex]0<|x-a|<\delta[/latex], so that [latex]|f(x)-L|\ge \varepsilon[/latex].
Let’s apply this in the example to show that a limit does not exist.
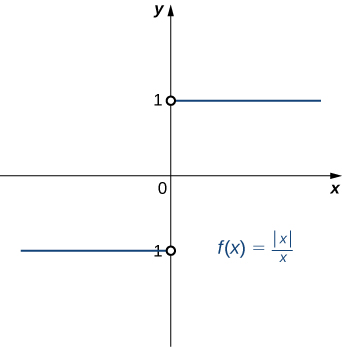
Show that [latex]\underset{x\to 0}{\lim}\dfrac{|x|}{x}[/latex] does not exist. The graph of [latex]f(x)=\dfrac{|x|}{x}[/latex] is shown here:
Finding Deltas Algebraically for Given Epsilons
Now that we have proven limits, we can now apply them with actual numbers for [latex]\varepsilon[/latex] and [latex]\delta[/latex]. Think of [latex]\varepsilon[/latex] as the error in the [latex]x[/latex]-direction and [latex]\delta[/latex] to be the error in the [latex]y[/latex]-direction. These have applications in engineering when these errors are considered tolerances. We want to know what the error intervals are, and we are trying to minimize these errors.
Find an open interval about [latex]x_0[/latex] on which the inequality [latex]|f(x)-L| < 0[/latex] holds. Then give the largest value [latex]\delta > 0[/latex] such that for all [latex]x[/latex] satisfying [latex]0 < |x-x_0| < \delta[/latex] the inequality [latex]|f(x)-L| < \varepsilon[/latex] holds.