- Find the balance point (center of mass) of straight objects and flat surfaces
- Utilize a shape’s symmetry to find the centroid, or geometric center, of flat objects
- Use Pappus’s theorem to calculate the volume of an object
Center of Mass and Moments
The basic idea of the center of mass is the notion of a balancing point. Many of us have seen performers who spin plates on the ends of sticks. The performers try to keep several of them spinning without allowing any of them to drop. If we look at a single plate (without spinning it), there is a sweet spot on the plate where it balances perfectly on the stick. If we put the stick anywhere other than that sweet spot, the plate does not balance and it falls to the ground. Mathematically, that sweet spot is called the center of mass of the plate.
Center of Mass of Objects on a Line
Let’s begin by looking at the center of mass in a one-dimensional context.
Consider a long, thin wire or rod of negligible mass resting on a fulcrum, as shown in Figure 1(a). Now suppose we place objects having masses [latex]{m}_{1}[/latex] and [latex]{m}_{2}[/latex] at distances [latex]{d}_{1}[/latex] and [latex]{d}_{2}[/latex] from the fulcrum, respectively, as shown in Figure 1(b).
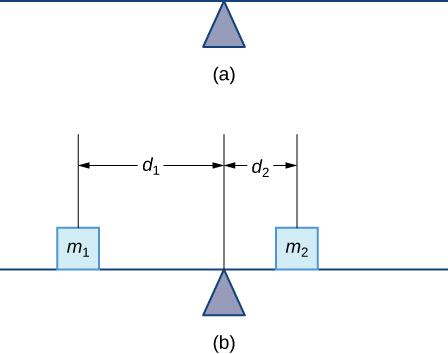
The most common real-life example of a system like this is a playground seesaw, or teeter-totter, with children of different weights sitting at different distances from the center. On a seesaw, if one child sits at each end, the heavier child sinks down and the lighter child is lifted into the air. If the heavier child slides in toward the center, though, the seesaw balances
Applying this concept to the masses on the rod, we note that the masses balance each other if and only if [latex]{m}_{1}{d}_{1}={m}_{2}{d}_{2}.[/latex]
In the seesaw example, we balanced the system by moving the masses (children) with respect to the fulcrum. However, we are really interested in systems in which the masses are not allowed to move, and instead we balance the system by moving the fulcrum.
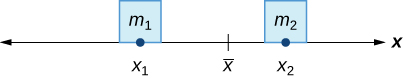
Suppose we have two point masses, [latex]{m}_{1}[/latex] and [latex]{m}_{2},[/latex] located on a number line at points [latex]{x}_{1}[/latex] and [latex]{x}_{2},[/latex] respectively (Figure 2). The center of mass, [latex]\overline{x},[/latex] is the point where the fulcrum should be placed to make the system balance.
Thus, we have
The expression in the numerator, [latex]{m}_{1}{x}_{1}+{m}_{2}{x}_{2},[/latex] is called the first moment of the system with respect to the origin. If the context is clear, we often drop the word “first” and just refer to this expression as the moment of the system.
The expression in the denominator, [latex]{m}_{1}+{m}_{2},[/latex] is the total mass of the system. Thus, the center of mass of the system is the point at which the total mass of the system could be concentrated without changing the moment.
If there are more than two point masses, the center of mass is given by:
center of mass of objects on a line
Let [latex]{m}_{1},{m}_{2}\text{,…},{m}_{n}[/latex] be point masses placed on a number line at points [latex]{x}_{1},{x}_{2}\text{,…},{x}_{n},[/latex] respectively, and let [latex]m=\underset{i=1}{\overset{n}{\text{∑}}}{m}_{i}[/latex] denote the total mass of the system. Then, the moment of the system with respect to the origin is given by
and the center of mass of the system is given by
Suppose four point masses are placed on a number line as follows:
Find the moment of the system with respect to the origin and find the center of mass of the system.
Center of Mass of Objects in a Plane
We can generalize this concept to find the center of mass of a system of point masses in a plane.
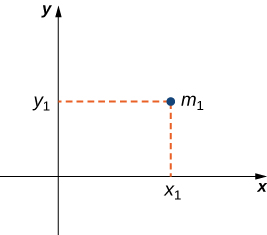
Let [latex]{m}_{1}[/latex] be a point mass located at point [latex]({x}_{1},{y}_{1})[/latex] in the plane. Then the moment [latex]{M}_{x}[/latex] of the mass with respect to the [latex]x[/latex]-axis is given by [latex]{M}_{x}={m}_{1}{y}_{1}.[/latex] Similarly, the moment [latex]{M}_{y}[/latex] with respect to the [latex]y[/latex]-axis is given by [latex]{M}_{y}={m}_{1}{x}_{1}.[/latex]
If we have several point masses in the [latex]xy[/latex]-plane, we can use the moments with respect to the [latex]x[/latex]– and [latex]y[/latex]-axes to calculate the [latex]x[/latex]– and [latex]y[/latex]-coordinates of the center of mass of the system.
center of mass of objects in a plane
Let [latex]{m}_{1},{m}_{2}\text{,…},{m}_{n}[/latex] be point masses located in the xy-plane at points [latex]({x}_{1},{y}_{1}),({x}_{2},{y}_{2})\text{,…},({x}_{n},{y}_{n}),[/latex] respectively, and let [latex]m=\underset{i=1}{\overset{n}{\text{∑}}}{m}_{i}[/latex] denote the total mass of the system. Then the moments [latex]{M}_{x}[/latex] and [latex]{M}_{y}[/latex] of the system with respect to the [latex]x[/latex]– and [latex]y[/latex]-axes, respectively, are given by
Also, the coordinates of the center of mass [latex](\overline{x},\overline{y})[/latex] of the system are
Suppose three point masses are placed in the xy-plane as follows (assume coordinates are given in meters):
Find the center of mass of the system.